最小生成樹(普裡姆演算法【Prim】與克魯斯卡爾演算法【Kruskal】)
寫在前面:博主是一位普普通通的19屆二本大學生,平時最大的愛好就是聽聽歌,逛逛B站。博主很喜歡的一句話
花開堪折直須折,莫待無花空折枝:博主的理解是頭一次爲人,就應該做自己想做的事,做自己不後悔的事,做自己以後不會留有遺憾的事,做自己覺得有意義的事,不浪費這大好的青春年華。博主寫部落格目的是記錄所學到的知識並方便自己複習,在記錄知識的同時獲得部分瀏覽量,得到更多人的認可,滿足小小的成就感,同時在寫部落格的途中結交更多志同道合的朋友,讓自己在技術的路上並不孤單。
目錄:
1.最小生成樹
生成樹概念
最小生成樹
2.普裡姆演算法【Prim】
普裡姆演算法簡介
普裡姆演算法完整程式碼實現 (C語言)
普裡姆演算法小結
3.克魯斯卡爾演算法【Kruskal】
克魯斯卡爾演算法簡介
克魯斯卡爾演算法完整程式碼實現 (C語言)
克魯斯卡爾演算法小結
1.最小生成樹
1.1生成樹概念
對
連通圖進行遍歷,過程中所經過的邊和頂點的組合可看做是一棵普通樹,通常稱爲生成樹。生成樹也理解爲包含所有頂點的極小連通子圖(極小連通子圖後邊會講)連通圖中的生成樹必須滿足以下 2 個條件:
1.包含連通圖中所有的頂點;
2.任意兩頂點之間有且僅有一條通路;
因此,連通圖的生成樹具有這樣的特徵,即生成樹中邊的數量 = 頂點數 - 1。
1.2最小生成樹
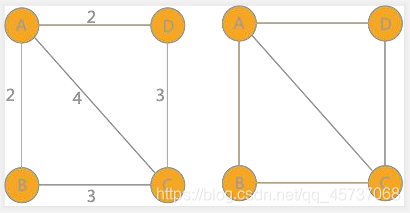
對於含有 n 個頂點的連通圖來說可能包含有多種生成樹,例如圖 1 所示:
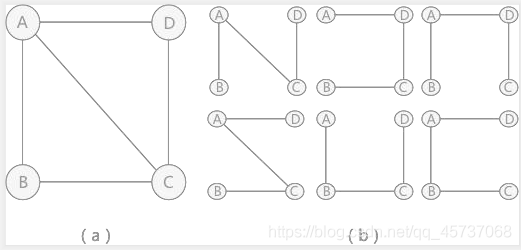
上圖中的連通圖和它相對應的生成樹,可以用於解決實際生活中的問題:假設 A、B、C 和 D 爲 4 座城市,爲了方便生產生 活,要爲這 4 座城市建立通訊。對於 4 個城市來講,本着節約經費的原則,只需要建立 3 個通訊線路即可,就如圖 1(b) 中的任意一種方式。 在具體選擇採用(b)中哪一種方式時,需要綜合考慮城市之間間隔的距離,建設通訊線路的難度等各種因素,將這些因素綜合 起來用一個數值表示,當作這條線路的權值。
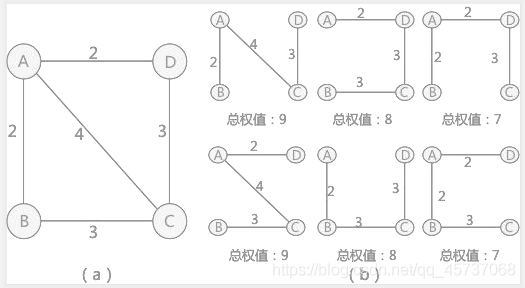
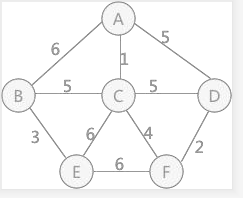
假設通過綜合分析,城市之間的權值如圖 2(a)所示,對於(b)的方案中,選擇權值總和爲 7 的兩種方案最節約經費。 這就是本節要討論的最小生成樹的問題,簡單得理解就是給定一個帶有權值的連通圖(連通網),如何從衆多的生成樹中篩選出 權值總和最小的生成樹,即爲該圖的 最小生成樹
給定一個連通網,求最小生成樹的方法有:普裡姆(Prim)演算法和克魯斯卡爾(Kruskal)演算法。
2.普裡姆演算法【Prim】
2.1普裡姆演算法簡介
普裡姆演算法在找最小生成樹時,將頂點分爲兩類:
一類是在查詢的過程中已經包含在樹中的(假設爲 A 類),剩下的是另一類 (假設爲 B 類)。
對於給定的連通網,起始狀態全部頂點都歸爲 B 類。在找最小生成樹時,選定任意一個頂點作爲起始點,並將之從 B 類移至 A
類;然後找出 B 類中到 A 類中的頂點之間權值最小的頂點,將之從 B 類移至 A 類,如此重複,直到 B 類中沒有頂點爲止。 所走過的頂點和邊就是該連通圖的最小生成樹。
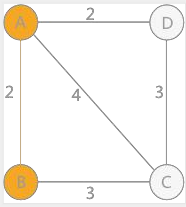
例如,通過普裡姆演算法查詢上圖的最小生成樹的步驟爲: 假如從頂點 A 出發,頂點 B、C、D 到頂點 A 的權值分別爲 2、4、2,所以,對於頂點 A 來說,頂點 B 和頂點 D 到 A 的 權值最小,假設先找到的頂點 B:
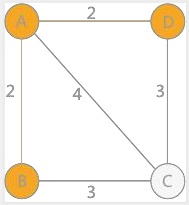
繼續分析頂點 C 和 D,頂點 C 到 B 的權值爲 3,到 A 的權值爲 4;頂點 D 到 A 的權值爲 2,到 B 的權值爲無窮大(如 果之間沒有直接通路,設定權值爲無窮大)。所以頂點 D 到 A 的權值最小:
最後,只剩下頂點 C,到 A 的權值爲 4,到 B 的權值和到 D 的權值一樣大,爲 3。所以該連通圖有兩個最小生成樹:
2.2普裡姆演算法完整程式碼實現 (C語言)
#include <stdio.h>
#include <stdlib.h>
#define VertexType int
#define VRType int
#define MAX_VERtEX_NUM 20
#define InfoType char #define INFINITY 65535
typedef struct {
VRType adj; //對於無權圖,用 1 或 0 表示是否相鄰;對於帶權圖,直接爲權值。
InfoType * info; //弧額外含有的資訊指針
}ArcCell,AdjMatrix[MAX_VERtEX_NUM][MAX_VERtEX_NUM];
typedef struct {
VertexType vexs[MAX_VERtEX_NUM]; //儲存圖中頂點數據
AdjMatrix arcs; //二維陣列,記錄頂點之間的關係
int vexnum,arcnum; //記錄圖的頂點數和弧(邊)數
}MGraph;
//根據頂點本身數據,判斷出頂點在二維陣列中的位置
int LocateVex(MGraph G,VertexType v){
int i=0;
//遍歷一維陣列,找到變數 v
for (; i<G.vexnum; i++) {
if (G.vexs[i]==v) {
return i;
}
}
return -1;
}
//構造無向網
void CreateUDN(MGraph* G){
scanf("%d,%d",&(G->vexnum),&(G->arcnum));
for (int i=0; i<G->vexnum; i++) {
scanf("%d",&(G->vexs[i]));
}
for (int i=0; i<G->vexnum; i++) {
for (int j=0; j<G->vexnum; j++) {
G->arcs[i][j].adj=INFINITY;
G->arcs[i][j].info=NULL;
}
}
for (int i=0; i<G->arcnum; i++) {
int v1,v2,w; scanf("%d,%d,%d",&v1,&v2,&w);
int m=LocateVex(*G, v1);
int n=LocateVex(*G, v2);
if (m==-1 ||n==-1) {
printf("no this vertex\n");
return;
}
G->arcs[n][m].adj=w;
G->arcs[m][n].adj=w;
}
}
//輔助陣列,用於每次篩選出權值最小的邊的鄰接點
typedef struct {
VertexType adjvex;//記錄權值最小的邊的起始點
VRType lowcost;//記錄該邊的權值
}closedge[MAX_VERtEX_NUM]; closedge theclose;//建立一個全域性陣列,因爲每個函數中都會使用到
//在輔助陣列中找出權值最小的邊的陣列下標,就可以間接找到此邊的終點頂點。
int minimun(MGraph G,closedge close){
int min=INFINITY;
int min_i=-1;
for (int i=0; i<G.vexnum; i++) {
//權值爲 0,說明頂點已經歸入最小生成樹中;然後每次和 min 變數進行比較,最後找出最小的。
if (close[i].lowcost>0 && close[i].lowcost < min) {
min=close[i].lowcost; min_i=i;
}
}
//返回最小權值所在的陣列下標
return min_i;
}
//普裡姆演算法函數,G 爲無向網,u 爲在網中選擇的任意頂點作爲起始點
void miniSpanTreePrim(MGraph G,VertexType u){
//找到該起始點在頂點陣列中的位置下標
int k=LocateVex(G, u);
//首先將與該起始點相關的所有邊的資訊:邊的起始點和權值,存入輔助陣列中相應的位置,例如(1,2)邊,adjvex 爲 0, lowcost 爲 6,存入 theclose[1]中,輔助陣列的下標表示該邊的頂點 2
for (int i=0; i<G.vexnum; i++) {
if (i !=k) {
theclose[i].adjvex=k;
theclose[i].lowcost=G.arcs[k][i].adj;
}
}
//由於起始點已經歸爲最小生成樹,所以輔助陣列對應位置的權值爲 0,這樣,遍歷時就不會被選中
theclose[k].lowcost=0;
//選擇下一個點,並更新輔助陣列中的資訊
for (int i=1; i<G.vexnum; i++) {
//找出權值最小的邊所在陣列下標
k=minimun(G, theclose);
//輸出選擇的路徑
printf("v%d v%d\n",G.vexs[theclose[k].adjvex],G.vexs[k]);
//歸入最小生成樹的頂點的輔助陣列中的權值設爲 0
theclose[k].lowcost=0;
//資訊輔助陣列中儲存的資訊,由於此時樹中新加入了一個頂點,需要判斷,由此頂點出發,到達其它各頂點的權值是否比之前記錄的權值還要小,如果還小,則更新
for (int j=0; j<G.vexnum; j++) {
if (G.arcs[k][j].adj<theclose[j].lowcost) {
theclose[j].adjvex=k;
theclose[j].lowcost=G.arcs[k][j].adj;
}
}
}
printf("\n");
}
int main(){
MGraph G;
CreateUDN(&G); miniSpanTreePrim(G, 1);
}
2.3普裡姆演算法小結
普裡姆演算法的執行效率只與連通網中包含的頂點數相關,而和網所含的邊數無關。所以普裡姆演算法適合於解決邊稠密的網,該演算法執行的時間複雜度爲:O(n2)
如果連通網中所含邊的綢密度不高,則建議使用克魯斯卡爾演算法求最小生成樹(下面 下麪會講)。
3.克魯斯卡爾演算法
3.1克魯斯卡爾演算法簡介
對於任意一個連通網的最小生成樹來說,在要求總的權值最小的情況下,最直接的想法就是將連通網中的所有邊按照權值大小進行升序排序,從小到大依次選擇。
由於最小生成樹本身是一棵生成樹,所以需要時刻滿足以下兩點:
- 生成樹中任意頂點之間有且僅有一條通路,也就是說,生成樹中不能存在迴路;
- 對於具有 n 個頂點的連通網,其生成樹中只能有 n-1 條邊,這 n-1
所以克魯斯卡爾演算法的具體思路是:將所有邊按照權值的大小進行升序排序,然後從小到大一一判斷,條件爲:如果這個邊不會與之前選擇的所有邊組成迴路,就可以作爲最小生成樹的一部分;反之,捨去。直到具有 n 個頂點的連通網篩選出來 n-1 條邊爲止。篩選出來的邊和所有的頂點構成此連通網的最小生成樹。
判斷是否會產生迴路的方法爲:在初始狀態下給每個頂點賦予不同的標記,對於遍歷過程的每條邊,其都有兩個頂點,判斷這兩個頂點的標記是否一致,如果一致,說明它們本身就處在一棵樹中,如果繼續連線就會產生迴路;如果不一致,說明它們之間還沒有任何關係,可以連線。假設遍歷到一條由頂點 A 和 B 構成的邊,而頂點 A 和頂點 B 標記不同,此時不僅需要將頂點 A 的標記更新爲頂點 B 的標記,還需要更改所有和頂點 A 標記相同的頂點的標記,全部改爲頂點 B 的標記。
如下例子,使用克魯斯卡爾演算法找最小生成樹的過程爲::
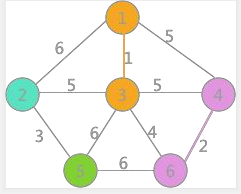
首先,在初始狀態下,對各頂點賦予不同的標記(用顏色區別),如下圖所示:
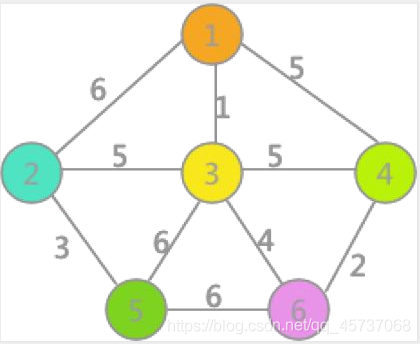
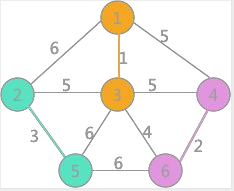
對所有邊按照權值的大小進行排序,按照從小到大的順序進行判斷,首先是(1,3),由於頂點 1 和頂點 3 標記不同,所以 可以構成生成樹的一部分,遍歷所有頂點,將與頂點 3 標記相同的全部更改爲頂點 1 的標記,如下:
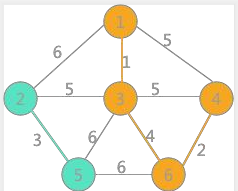
其次是(4,6)邊,兩頂點標記不同,所以可以構成生成樹的一部分,更新所有頂點的標記爲:
其次是(2,5)邊,兩頂點標記不同,可以構成生成樹的一部分,更新所有頂點的標記爲:
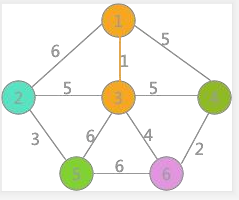
然後最小的是(3,6)邊,兩者標記不同,可以連線,遍歷所有頂點,將與頂點 6 標記相同的所有頂點的標記更改爲頂點 1 的標記:
繼續選擇權值最小的邊,此時會發現,權值爲 5 的邊有 3 個,其中(1,4)和(3,4)各自兩頂點的標記一樣,如果連線會產生迴路,所以捨去,而(2,3)標記不一樣,可以選擇,將所有與頂點 2 標記相同的頂點的標記全部改爲同頂點 3 相同的標記:
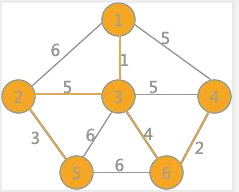
當選取的邊的數量相比與頂點的數量小 1 時,說明最小生成樹已經生成。所以最終採用克魯斯卡爾演算法得到的最小生成樹爲(6)所示
3.2克魯斯卡爾演算法完整程式碼實現 (C語言)
#include "stdio.h"
#include "stdlib.h"
#define MAX_VERtEX_NUM 20
#define VertexType int
typedef struct edge{
VertexType initial;
VertexType end;
VertexType weight;
}edge[MAX_VERtEX_NUM];
//定義輔助陣列
typedef struct {
VertexType value;//頂點數據
int sign;//每個頂點所屬的集合
}assist[MAX_VERtEX_NUM]; assist assists;
//qsort 排序函數中使用,使 edges 結構體中的邊按照權值大小升序排序
int cmp(const void *a,const void*b){
return ((struct edge*)a)->weight-((struct edge*)b)->weight;
}
//初始化連通網
void CreateUDN(edge *edges,int *vexnum,int *arcnum){
printf("輸入連通網的邊數:\n");
scanf("%d %d",&(*vexnum),&(*arcnum));
printf("輸入連通網的頂點:\n");
for (int i=0; i<(*vexnum); i++) {
scanf("%d",&(assists[i].value)); assists[i].sign=i;
}
printf("輸入各邊的起始點和終點及權重:\n");
for (int i=0 ; i<(*arcnum); i++) {
scanf("%d,%d,%d",&(*edges)[i].initial,&(*edges)[i].end,&(*edges)[i].weight);
}
}
//在 assists 陣列中找到頂點 point 對應的位置下標
int Locatevex(int vexnum,int point){
for (int i=0; i<vexnum; i++) {
if (assists[i].value==point) {
return i;
}
}
return -1;
}
int main(){
int arcnum,vexnum; edge edges;
CreateUDN(&edges,&vexnum,&arcnum);
//對連通網中的所有邊進行升序排序,結果仍儲存在 edges 陣列中
qsort(edges, arcnum, sizeof(edges[0]), cmp);
//建立一個空的結構體陣列,用於存放最小生成樹
edge minTree;
//設定一個用於記錄最小生成樹中邊的數量的常數
int num=0;
//遍歷所有的邊
for (int i=0; i<arcnum; i++) {
//找到邊的起始頂點和結束頂點在陣列 assists 中的位置
int initial=Locatevex(vexnum, edges[i].initial);
int end=Locatevex(vexnum, edges[i].end);
//如果頂點位置存在且頂點的標記不同,說明不在一個集閤中,不會產生迴路
if (initial!=-1&& end!=-1&&assists[initial].sign!=assists[end].sign) {
//記錄該邊,作爲最小生成樹的組成部分
minTree[num]=edges[i];
//計數+1 num++;
//將新加入生成樹的頂點標記全不更改爲一樣的
for (int k=0; k<vexnum; k++) {
if (assists[k].sign==assists[end].sign) {
assists[k].sign=assists[initial].sign;
}
}
//如果選擇的邊的數量和頂點數相差 1,證明最小生成樹已經形成,退出回圈
if (num==vexnum-1) {
break; }
}
}
//輸出語句
for (int i=0; i<vexnum-1; i++) {
printf("%d,%d\n",minTree[i].initial,minTree[i].end);
}
return 0;
}
3.3克魯斯卡爾演算法小結
剛剛介紹了求最小生成樹之普裡姆演算法。該演算法從
頂點的角度爲出發點,時間複雜度爲 O(n2),更適合與解決邊的綢密度更高 的連通網。 本節所介紹的克魯斯卡爾演算法,從邊的角度求網的最小生成樹,時間複雜度爲O(eloge)。和普裡姆演算法恰恰相反,更適合於求 邊稀疏的網的最小生成樹