STM32之LL庫版TIM+DMA+ADC實現信號採集(三)
2020-08-11 22:48:49
串列埠重定向
爲了能夠直觀的通過串列埠看到輸出,因此需要對串列埠進行輸出重定向,輸入就不用管他了。
新增標頭檔案
#include <stdio.h>
新增重定向程式碼
int fputc(int ch,FILE *f)
{
//__STATIC_INLINE void LL_USART_TransmitData8(USART_TypeDef *USARTx, uint8_t Value)
LL_USART_TransmitData8(USART3, ch);
LL_mDelay(1);
return ch;
}
補充DMA功能
系統自動生成的程式碼是不能夠直接執行的,需要我們對程式碼進行修改,首先是補充DMA功能,將DMA函數修改爲下面 下麪的樣子。
/**
* Enable DMA controller clock
*/
static void MX_DMA_Init(void)
{
/* Init with LL driver */
/* DMA controller clock enable */
LL_AHB1_GRP1_EnableClock(LL_AHB1_GRP1_PERIPH_DMA2);
/* DMA interrupt init */
/* DMA2_Stream0_IRQn interrupt configuration */
NVIC_SetPriority(DMA2_Stream0_IRQn, NVIC_EncodePriority(NVIC_GetPriorityGrouping(),5, 0));
NVIC_EnableIRQ(DMA2_Stream0_IRQn);
/* Set DMA transfer addresses of source and destination */
LL_DMA_ConfigAddresses(DMA2,
LL_DMA_CHANNEL_0,
LL_ADC_DMA_GetRegAddr(ADC1, LL_ADC_DMA_REG_REGULAR_DATA),
(uint32_t)&aADCxConvertedData,
LL_DMA_DIRECTION_PERIPH_TO_MEMORY);
/* Set DMA transfer size */
LL_DMA_SetDataLength(DMA2,
LL_DMA_CHANNEL_0,
1);
/* Enable DMA transfer interruption: transfer complete */
LL_DMA_EnableIT_TC(DMA2,
LL_DMA_CHANNEL_0);
/*## Activation of DMA #####################################################*/
/* Enable the DMA transfer */
LL_DMA_EnableStream(DMA2,LL_DMA_STREAM_0);
}
aADCxConvertedData就是我們最終存放轉換結果的地方,我們需要定義這個變數,在函數宣告的下面 下麪定義
/* USER CODE BEGIN PFP */
uint16_t aADCxConvertedData;
/* USER CODE END PFP */
另外還需要將ADC初始化函數中的DMA部分程式碼移到DMA初始化函數中,不然轉換的結果永遠是8位元,即ADC的輸出最大隻有255,這個坑要小心。
因此最終DMA函數的程式碼爲
/**
* Enable DMA controller clock
*/
static void MX_DMA_Init(void)
{
/* Init with LL driver */
/* DMA controller clock enable */
LL_AHB1_GRP1_EnableClock(LL_AHB1_GRP1_PERIPH_DMA2);
/* DMA interrupt init */
/* DMA2_Stream0_IRQn interrupt configuration */
NVIC_SetPriority(DMA2_Stream0_IRQn, NVIC_EncodePriority(NVIC_GetPriorityGrouping(),5, 0));
NVIC_EnableIRQ(DMA2_Stream0_IRQn);
/* ADC1 DMA Init */
/* ADC1 Init */
LL_DMA_SetChannelSelection(DMA2, LL_DMA_STREAM_0, LL_DMA_CHANNEL_0);
LL_DMA_SetDataTransferDirection(DMA2, LL_DMA_STREAM_0, LL_DMA_DIRECTION_PERIPH_TO_MEMORY);
LL_DMA_SetStreamPriorityLevel(DMA2, LL_DMA_STREAM_0, LL_DMA_PRIORITY_VERYHIGH);
LL_DMA_SetMode(DMA2, LL_DMA_STREAM_0, LL_DMA_MODE_CIRCULAR);
LL_DMA_SetPeriphIncMode(DMA2, LL_DMA_STREAM_0, LL_DMA_PERIPH_NOINCREMENT);
LL_DMA_SetMemoryIncMode(DMA2, LL_DMA_STREAM_0, LL_DMA_MEMORY_INCREMENT);
LL_DMA_SetPeriphSize(DMA2, LL_DMA_STREAM_0, LL_DMA_PDATAALIGN_WORD);
LL_DMA_SetMemorySize(DMA2, LL_DMA_STREAM_0, LL_DMA_MDATAALIGN_WORD);
LL_DMA_DisableFifoMode(DMA2, LL_DMA_STREAM_0);
/* Set DMA transfer addresses of source and destination */
LL_DMA_ConfigAddresses(DMA2,
LL_DMA_CHANNEL_0,
LL_ADC_DMA_GetRegAddr(ADC1, LL_ADC_DMA_REG_REGULAR_DATA),
(uint32_t)&aADCxConvertedData,
LL_DMA_DIRECTION_PERIPH_TO_MEMORY);
/* Set DMA transfer size */
LL_DMA_SetDataLength(DMA2,
LL_DMA_CHANNEL_0,
1);
/* Enable DMA transfer interruption: transfer complete */
LL_DMA_EnableIT_TC(DMA2,
LL_DMA_CHANNEL_0);
/*## Activation of DMA #####################################################*/
/* Enable the DMA transfer */
LL_DMA_EnableStream(DMA2,LL_DMA_STREAM_0);
}
定時器部分
定時器需要新增一個初始化語句,新增在函數的最後。
LL_TIM_EnableCounter(TIM2);
此外還需要註釋掉
// LL_TIM_SetClockSource(TIM2, LL_TIM_CLOCKSOURCE_INTERNAL);
// LL_TIM_SetTriggerInput(TIM2, LL_TIM_TS_ITR0);
// LL_TIM_SetSlaveMode(TIM2, LL_TIM_SLAVEMODE_GATED);
ADC部分
ADC部分也需要新增一個初始化語句
//LL_ADC_EnableIT_OVR(ADC1);//
LL_ADC_Enable(ADC1);//
LL_ADC_EnableIT_OVR(ADC1);
同時還需要將修改DMATransfer爲
ADC_REG_InitStruct.DMATransfer = LL_ADC_REG_DMA_TRANSFER_UNLIMITED;
中斷函數部分
中斷函數裏面也要新增內容,新增的東西如下
void DMA2_Stream0_IRQHandler(void)
{
if(LL_DMA_IsActiveFlag_TC0(DMA2) == 1)
{
/* Clear flag DMA transfer complete */
LL_DMA_ClearFlag_TC0(DMA2);
/* USER CODE END WHILE */
// LL_ADC_REG_StartConversionExtTrig(ADC1, LL_ADC_REG_TRIG_EXT_RISINGFALLING);
/* USER CODE BEGIN 3 */
/* Call interruption treatment function */
}
}
void ADC_IRQHandler(void)
{
if(LL_ADC_IsActiveFlag_OVR(ADC1) != 0)
{
/* Clear flag ADC group regular overrun */
LL_ADC_ClearFlag_OVR(ADC1);
/* Call interruption treatment function */
}
}
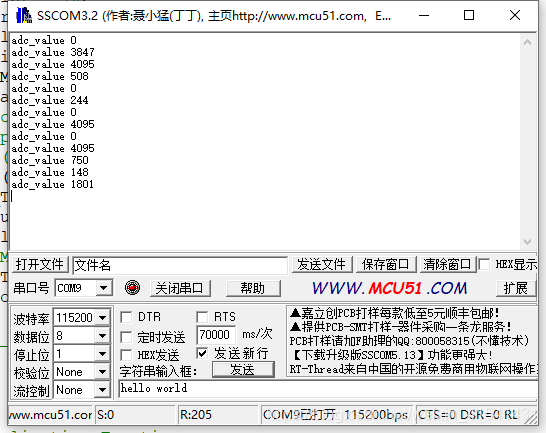
最後在主回圈中加入
printf("adc_value %d \r\n",aADCxConvertedData);
LL_mDelay(200);
最終效果
主函數程式爲
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2020 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include <stdio.h>
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
int fputc(int ch,FILE *f)
{
// HAL_UART_Transmit(&huart3,(uint8_t*)&ch,1,100);
//__STATIC_INLINE void LL_USART_TransmitData8(USART_TypeDef *USARTx, uint8_t Value)
LL_USART_TransmitData8(USART3, ch);
LL_mDelay(1);
return ch;
}
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_DMA_Init(void);
static void MX_ADC1_Init(void);
static void MX_USART3_UART_Init(void);
static void MX_TIM2_Init(void);
/* USER CODE BEGIN PFP */
uint16_t aADCxConvertedData;
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
LL_APB1_GRP1_EnableClock(LL_APB1_GRP1_PERIPH_PWR);
LL_APB2_GRP1_EnableClock(LL_APB2_GRP1_PERIPH_SYSCFG);
NVIC_SetPriorityGrouping(NVIC_PRIORITYGROUP_4);
/* System interrupt init*/
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_ADC1_Init();
MX_USART3_UART_Init();
MX_TIM2_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
printf("adc_value %d \r\n",aADCxConvertedData);
LL_mDelay(200);
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
LL_FLASH_SetLatency(LL_FLASH_LATENCY_3);
while(LL_FLASH_GetLatency()!= LL_FLASH_LATENCY_3)
{
}
LL_PWR_SetRegulVoltageScaling(LL_PWR_REGU_VOLTAGE_SCALE3);
LL_PWR_EnableOverDriveMode();
LL_RCC_HSE_EnableBypass();
LL_RCC_HSE_Enable();
/* Wait till HSE is ready */
while(LL_RCC_HSE_IsReady() != 1)
{
}
LL_RCC_PLL_ConfigDomain_SYS(LL_RCC_PLLSOURCE_HSE, LL_RCC_PLLM_DIV_4, 96, LL_RCC_PLLP_DIV_2);
LL_RCC_PLL_Enable();
/* Wait till PLL is ready */
while(LL_RCC_PLL_IsReady() != 1)
{
}
LL_RCC_SetAHBPrescaler(LL_RCC_SYSCLK_DIV_1);
LL_RCC_SetAPB1Prescaler(LL_RCC_APB1_DIV_2);
LL_RCC_SetAPB2Prescaler(LL_RCC_APB2_DIV_1);
LL_RCC_SetSysClkSource(LL_RCC_SYS_CLKSOURCE_PLL);
/* Wait till System clock is ready */
while(LL_RCC_GetSysClkSource() != LL_RCC_SYS_CLKSOURCE_STATUS_PLL)
{
}
LL_Init1msTick(96000000);
LL_SetSystemCoreClock(96000000);
LL_RCC_SetUSARTClockSource(LL_RCC_USART3_CLKSOURCE_PCLK1);
}
/**
* @brief ADC1 Initialization Function
* @param None
* @retval None
*/
static void MX_ADC1_Init(void)
{
/* USER CODE BEGIN ADC1_Init 0 */
/* USER CODE END ADC1_Init 0 */
LL_ADC_InitTypeDef ADC_InitStruct = {0};
LL_ADC_REG_InitTypeDef ADC_REG_InitStruct = {0};
LL_ADC_CommonInitTypeDef ADC_CommonInitStruct = {0};
LL_GPIO_InitTypeDef GPIO_InitStruct = {0};
/* Peripheral clock enable */
LL_APB2_GRP1_EnableClock(LL_APB2_GRP1_PERIPH_ADC1);
LL_AHB1_GRP1_EnableClock(LL_AHB1_GRP1_PERIPH_GPIOA);
/**ADC1 GPIO Configuration
PA4 ------> ADC1_IN4
*/
GPIO_InitStruct.Pin = LL_GPIO_PIN_4;
GPIO_InitStruct.Mode = LL_GPIO_MODE_ANALOG;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
LL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* ADC1 interrupt Init */
NVIC_SetPriority(ADC_IRQn, NVIC_EncodePriority(NVIC_GetPriorityGrouping(),1, 0));
NVIC_EnableIRQ(ADC_IRQn);
/* USER CODE BEGIN ADC1_Init 1 */
/* USER CODE END ADC1_Init 1 */
/** Common config
*/
ADC_InitStruct.Resolution = LL_ADC_RESOLUTION_12B;
ADC_InitStruct.DataAlignment = LL_ADC_DATA_ALIGN_RIGHT;
ADC_InitStruct.SequencersScanMode = LL_ADC_SEQ_SCAN_DISABLE;
LL_ADC_Init(ADC1, &ADC_InitStruct);
ADC_REG_InitStruct.TriggerSource = LL_ADC_REG_TRIG_EXT_TIM2_TRGO;
ADC_REG_InitStruct.SequencerLength = LL_ADC_REG_SEQ_SCAN_DISABLE;
ADC_REG_InitStruct.SequencerDiscont = LL_ADC_REG_SEQ_DISCONT_DISABLE;
ADC_REG_InitStruct.ContinuousMode = LL_ADC_REG_CONV_SINGLE;
ADC_REG_InitStruct.DMATransfer = LL_ADC_REG_DMA_TRANSFER_UNLIMITED;
LL_ADC_REG_Init(ADC1, &ADC_REG_InitStruct);
LL_ADC_REG_SetFlagEndOfConversion(ADC1, LL_ADC_REG_FLAG_EOC_UNITARY_CONV);
ADC_CommonInitStruct.CommonClock = LL_ADC_CLOCK_SYNC_PCLK_DIV4;
ADC_CommonInitStruct.Multimode = LL_ADC_MULTI_INDEPENDENT;
LL_ADC_CommonInit(__LL_ADC_COMMON_INSTANCE(ADC1), &ADC_CommonInitStruct);
LL_ADC_REG_StartConversionExtTrig(ADC1, LL_ADC_REG_TRIG_EXT_RISING);
/** Configure Regular Channel
*/
LL_ADC_REG_SetSequencerRanks(ADC1, LL_ADC_REG_RANK_1, LL_ADC_CHANNEL_4);
LL_ADC_SetChannelSamplingTime(ADC1, LL_ADC_CHANNEL_4, LL_ADC_SAMPLINGTIME_3CYCLES);
/* USER CODE BEGIN ADC1_Init 2 */
//LL_ADC_EnableIT_OVR(ADC1);//
LL_ADC_Enable(ADC1);//
LL_ADC_EnableIT_OVR(ADC1);
/* USER CODE END ADC1_Init 2 */
}
/**
* @brief TIM2 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
LL_TIM_InitTypeDef TIM_InitStruct = {0};
/* Peripheral clock enable */
LL_APB1_GRP1_EnableClock(LL_APB1_GRP1_PERIPH_TIM2);
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
TIM_InitStruct.Prescaler = 96;
TIM_InitStruct.CounterMode = LL_TIM_COUNTERMODE_UP;
TIM_InitStruct.Autoreload = 1000;
TIM_InitStruct.ClockDivision = LL_TIM_CLOCKDIVISION_DIV1;
LL_TIM_Init(TIM2, &TIM_InitStruct);
LL_TIM_EnableARRPreload(TIM2);
// LL_TIM_SetClockSource(TIM2, LL_TIM_CLOCKSOURCE_INTERNAL);
// LL_TIM_SetTriggerInput(TIM2, LL_TIM_TS_ITR0);
// LL_TIM_SetSlaveMode(TIM2, LL_TIM_SLAVEMODE_GATED);
LL_TIM_DisableIT_TRIG(TIM2);
LL_TIM_DisableDMAReq_TRIG(TIM2);
LL_TIM_SetTriggerOutput(TIM2, LL_TIM_TRGO_UPDATE);
LL_TIM_DisableMasterSlaveMode(TIM2);
/* USER CODE BEGIN TIM2_Init 2 */
LL_TIM_EnableCounter(TIM2);
LL_TIM_SetRepetitionCounter(TIM2, 0);
/* USER CODE END TIM2_Init 2 */
}
/**
* @brief USART3 Initialization Function
* @param None
* @retval None
*/
static void MX_USART3_UART_Init(void)
{
/* USER CODE BEGIN USART3_Init 0 */
/* USER CODE END USART3_Init 0 */
LL_USART_InitTypeDef USART_InitStruct = {0};
LL_GPIO_InitTypeDef GPIO_InitStruct = {0};
/* Peripheral clock enable */
LL_APB1_GRP1_EnableClock(LL_APB1_GRP1_PERIPH_USART3);
LL_AHB1_GRP1_EnableClock(LL_AHB1_GRP1_PERIPH_GPIOD);
/**USART3 GPIO Configuration
PD8 ------> USART3_TX
PD9 ------> USART3_RX
*/
GPIO_InitStruct.Pin = STLK_RX_Pin;
GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
GPIO_InitStruct.Alternate = LL_GPIO_AF_7;
LL_GPIO_Init(STLK_RX_GPIO_Port, &GPIO_InitStruct);
GPIO_InitStruct.Pin = STLK_TX_Pin;
GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
GPIO_InitStruct.Alternate = LL_GPIO_AF_7;
LL_GPIO_Init(STLK_TX_GPIO_Port, &GPIO_InitStruct);
/* USART3 interrupt Init */
NVIC_SetPriority(USART3_IRQn, NVIC_EncodePriority(NVIC_GetPriorityGrouping(),0, 0));
NVIC_EnableIRQ(USART3_IRQn);
/* USER CODE BEGIN USART3_Init 1 */
/* USER CODE END USART3_Init 1 */
USART_InitStruct.BaudRate = 115200;
USART_InitStruct.DataWidth = LL_USART_DATAWIDTH_8B;
USART_InitStruct.StopBits = LL_USART_STOPBITS_1;
USART_InitStruct.Parity = LL_USART_PARITY_NONE;
USART_InitStruct.TransferDirection = LL_USART_DIRECTION_TX_RX;
USART_InitStruct.HardwareFlowControl = LL_USART_HWCONTROL_NONE;
USART_InitStruct.OverSampling = LL_USART_OVERSAMPLING_16;
LL_USART_Init(USART3, &USART_InitStruct);
LL_USART_ConfigAsyncMode(USART3);
LL_USART_Enable(USART3);
/* USER CODE BEGIN USART3_Init 2 */
/* USER CODE END USART3_Init 2 */
}
/**
* Enable DMA controller clock
*/
static void MX_DMA_Init(void)
{
/* Init with LL driver */
/* DMA controller clock enable */
LL_AHB1_GRP1_EnableClock(LL_AHB1_GRP1_PERIPH_DMA2);
/* DMA interrupt init */
/* DMA2_Stream0_IRQn interrupt configuration */
NVIC_SetPriority(DMA2_Stream0_IRQn, NVIC_EncodePriority(NVIC_GetPriorityGrouping(),5, 0));
NVIC_EnableIRQ(DMA2_Stream0_IRQn);
/* ADC1 DMA Init */
/* ADC1 Init */
LL_DMA_SetChannelSelection(DMA2, LL_DMA_STREAM_0, LL_DMA_CHANNEL_0);
LL_DMA_SetDataTransferDirection(DMA2, LL_DMA_STREAM_0, LL_DMA_DIRECTION_PERIPH_TO_MEMORY);
LL_DMA_SetStreamPriorityLevel(DMA2, LL_DMA_STREAM_0, LL_DMA_PRIORITY_VERYHIGH);
LL_DMA_SetMode(DMA2, LL_DMA_STREAM_0, LL_DMA_MODE_CIRCULAR);
LL_DMA_SetPeriphIncMode(DMA2, LL_DMA_STREAM_0, LL_DMA_PERIPH_NOINCREMENT);
LL_DMA_SetMemoryIncMode(DMA2, LL_DMA_STREAM_0, LL_DMA_MEMORY_INCREMENT);
LL_DMA_SetPeriphSize(DMA2, LL_DMA_STREAM_0, LL_DMA_PDATAALIGN_WORD);
LL_DMA_SetMemorySize(DMA2, LL_DMA_STREAM_0, LL_DMA_MDATAALIGN_WORD);
LL_DMA_DisableFifoMode(DMA2, LL_DMA_STREAM_0);
/* Set DMA transfer addresses of source and destination */
LL_DMA_ConfigAddresses(DMA2,
LL_DMA_CHANNEL_0,
LL_ADC_DMA_GetRegAddr(ADC1, LL_ADC_DMA_REG_REGULAR_DATA),
(uint32_t)&aADCxConvertedData,
LL_DMA_DIRECTION_PERIPH_TO_MEMORY);
/* Set DMA transfer size */
LL_DMA_SetDataLength(DMA2,
LL_DMA_CHANNEL_0,
1);
/* Enable DMA transfer interruption: transfer complete */
LL_DMA_EnableIT_TC(DMA2,
LL_DMA_CHANNEL_0);
/*## Activation of DMA #####################################################*/
/* Enable the DMA transfer */
LL_DMA_EnableStream(DMA2,LL_DMA_STREAM_0);
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
LL_EXTI_InitTypeDef EXTI_InitStruct = {0};
LL_GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
LL_AHB1_GRP1_EnableClock(LL_AHB1_GRP1_PERIPH_GPIOC);
LL_AHB1_GRP1_EnableClock(LL_AHB1_GRP1_PERIPH_GPIOH);
LL_AHB1_GRP1_EnableClock(LL_AHB1_GRP1_PERIPH_GPIOA);
LL_AHB1_GRP1_EnableClock(LL_AHB1_GRP1_PERIPH_GPIOB);
LL_AHB1_GRP1_EnableClock(LL_AHB1_GRP1_PERIPH_GPIOD);
LL_AHB1_GRP1_EnableClock(LL_AHB1_GRP1_PERIPH_GPIOG);
/**/
LL_GPIO_ResetOutputPin(LD1_GPIO_Port, LD1_Pin);
/**/
LL_GPIO_ResetOutputPin(LD3_GPIO_Port, LD3_Pin);
/**/
LL_GPIO_ResetOutputPin(USB_PowerSwitchOn_GPIO_Port, USB_PowerSwitchOn_Pin);
/**/
LL_GPIO_ResetOutputPin(LD2_GPIO_Port, LD2_Pin);
/**/
LL_SYSCFG_SetEXTISource(LL_SYSCFG_EXTI_PORTC, LL_SYSCFG_EXTI_LINE13);
/**/
EXTI_InitStruct.Line_0_31 = LL_EXTI_LINE_13;
EXTI_InitStruct.LineCommand = ENABLE;
EXTI_InitStruct.Mode = LL_EXTI_MODE_IT;
EXTI_InitStruct.Trigger = LL_EXTI_TRIGGER_RISING;
LL_EXTI_Init(&EXTI_InitStruct);
/**/
LL_GPIO_SetPinPull(USER_Btn_GPIO_Port, USER_Btn_Pin, LL_GPIO_PULL_NO);
/**/
LL_GPIO_SetPinMode(USER_Btn_GPIO_Port, USER_Btn_Pin, LL_GPIO_MODE_INPUT);
/**/
GPIO_InitStruct.Pin = RMII_MDC_Pin;
GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
GPIO_InitStruct.Alternate = LL_GPIO_AF_11;
LL_GPIO_Init(RMII_MDC_GPIO_Port, &GPIO_InitStruct);
/**/
GPIO_InitStruct.Pin = RMII_REF_CLK_Pin;
GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
GPIO_InitStruct.Alternate = LL_GPIO_AF_11;
LL_GPIO_Init(RMII_REF_CLK_GPIO_Port, &GPIO_InitStruct);
/**/
GPIO_InitStruct.Pin = RMII_MDIO_Pin;
GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
GPIO_InitStruct.Alternate = LL_GPIO_AF_11;
LL_GPIO_Init(RMII_MDIO_GPIO_Port, &GPIO_InitStruct);
/**/
GPIO_InitStruct.Pin = RMII_CRS_DV_Pin;
GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
GPIO_InitStruct.Alternate = LL_GPIO_AF_11;
LL_GPIO_Init(RMII_CRS_DV_GPIO_Port, &GPIO_InitStruct);
/**/
GPIO_InitStruct.Pin = RMII_RXD0_Pin;
GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
GPIO_InitStruct.Alternate = LL_GPIO_AF_11;
LL_GPIO_Init(RMII_RXD0_GPIO_Port, &GPIO_InitStruct);
/**/
GPIO_InitStruct.Pin = RMII_RXD1_Pin;
GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
GPIO_InitStruct.Alternate = LL_GPIO_AF_11;
LL_GPIO_Init(RMII_RXD1_GPIO_Port, &GPIO_InitStruct);
/**/
GPIO_InitStruct.Pin = LD1_Pin;
GPIO_InitStruct.Mode = LL_GPIO_MODE_OUTPUT;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
LL_GPIO_Init(LD1_GPIO_Port, &GPIO_InitStruct);
/**/
GPIO_InitStruct.Pin = RMII_TXD1_Pin;
GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
GPIO_InitStruct.Alternate = LL_GPIO_AF_11;
LL_GPIO_Init(RMII_TXD1_GPIO_Port, &GPIO_InitStruct);
/**/
GPIO_InitStruct.Pin = LD3_Pin;
GPIO_InitStruct.Mode = LL_GPIO_MODE_OUTPUT;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
LL_GPIO_Init(LD3_GPIO_Port, &GPIO_InitStruct);
/**/
GPIO_InitStruct.Pin = USB_PowerSwitchOn_Pin;
GPIO_InitStruct.Mode = LL_GPIO_MODE_OUTPUT;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
LL_GPIO_Init(USB_PowerSwitchOn_GPIO_Port, &GPIO_InitStruct);
/**/
GPIO_InitStruct.Pin = USB_OverCurrent_Pin;
GPIO_InitStruct.Mode = LL_GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
LL_GPIO_Init(USB_OverCurrent_GPIO_Port, &GPIO_InitStruct);
/**/
GPIO_InitStruct.Pin = USB_SOF_Pin;
GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
GPIO_InitStruct.Alternate = LL_GPIO_AF_10;
LL_GPIO_Init(USB_SOF_GPIO_Port, &GPIO_InitStruct);
/**/
GPIO_InitStruct.Pin = USB_VBUS_Pin;
GPIO_InitStruct.Mode = LL_GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
LL_GPIO_Init(USB_VBUS_GPIO_Port, &GPIO_InitStruct);
/**/
GPIO_InitStruct.Pin = USB_ID_Pin;
GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
GPIO_InitStruct.Alternate = LL_GPIO_AF_10;
LL_GPIO_Init(USB_ID_GPIO_Port, &GPIO_InitStruct);
/**/
GPIO_InitStruct.Pin = USB_DM_Pin;
GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
GPIO_InitStruct.Alternate = LL_GPIO_AF_10;
LL_GPIO_Init(USB_DM_GPIO_Port, &GPIO_InitStruct);
/**/
GPIO_InitStruct.Pin = USB_DP_Pin;
GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
GPIO_InitStruct.Alternate = LL_GPIO_AF_10;
LL_GPIO_Init(USB_DP_GPIO_Port, &GPIO_InitStruct);
/**/
GPIO_InitStruct.Pin = RMII_TX_EN_Pin;
GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
GPIO_InitStruct.Alternate = LL_GPIO_AF_11;
LL_GPIO_Init(RMII_TX_EN_GPIO_Port, &GPIO_InitStruct);
/**/
GPIO_InitStruct.Pin = RMII_TXD0_Pin;
GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
GPIO_InitStruct.Alternate = LL_GPIO_AF_11;
LL_GPIO_Init(RMII_TXD0_GPIO_Port, &GPIO_InitStruct);
/**/
GPIO_InitStruct.Pin = LD2_Pin;
GPIO_InitStruct.Mode = LL_GPIO_MODE_OUTPUT;
GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;
GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;
LL_GPIO_Init(LD2_GPIO_Port, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
工程的完整程式碼爲工程程式碼
總結
使用DMA+ADC+TIM的過程差不多就是這個樣子,對於多個數據的採集只需要在DMA中斷中完成即可,這樣就可以進行下一步的FFT和FIR了。